
Les réseaux informatiques et bureautiques sont les plus connus des réseaux . Ce sont ceux qui se développent le plus rapidement et qui sont le plus souvent renouvelés . En plus des réseaux bureautiques, dans le monde de l’industrie, on trouve des réseaux plus élémentaires avec peu de volumes d’information mais très fiables avec une grande disponibilité : les réseaux locaux industriels . Ils utilisent des protocoles simples et sont souvent très protégés contre les perturbations car ils sont utilisés dans des environnements difficiles et perturbés : magnétiquement, électriquement, physiquement . Ils sont par exemple utilisés dans les salles de machines de travail, sur les chaînes de montage de voitures, dans les TGV, pour la récupération d’informations de capteurs ou la synchronisation avec une base de données de badges d’authentification pour des salles sécurisées . On trouve essentiellement les protocoles Modbus, Jbus, FIP ou Bitbus pour les réseaux de terrains ou des bus CAN pour les chars, les automobiles ou les avions .
– Le protocole BitBus d’Intel a été inventé en 1983 et il s’agit d’un bus entre microprocesseurs . Il est utilisé pour les applications de contrôle et les commandes industrielles par exemple pour commander un tapis roulant sur une chaîne de montage . Il a une topologie en bus avec 250 nœuds maximum et 30 mètres à 1200 mètres sans répéteurs au plus . Il utilise comme support de transmission la paire torsadée blindée ou du fil en nappes suivant le degré d’immunité électrique requis et peut atteindre un débit de 2,4 Mbit/s . Il utilise une approche maître-esclaves avec un nœud maître et des nœuds esclaves . Le nœud maître interroge les nœuds esclaves un par un et informent les autres nœuds de leurs états .

– Le protocole FIP Factory Instrumentation Protocol est un protocole peu ambitieux mais peu cher qui permet de réduire les coûts de raccordement des capteurs et des actionneurs . Les flux de données et les échanges doivent être connus à l’avance et ne doivent pas être destinés à changer . Il utilise une topologie en arbre et étoile avec un double médium basé sur de la paire torsadée blindée ou de la fibre optique pour la fiabilité et un débit de 1 à 5 Mbit/s . Le débit diminue avec la distance et chute à 1 Mbit/s à 4000m . Il n’y a pas de maître-esclaves mais un arbitre de bus (= une machine dédiée) et les abonnés . L’arbitre de bus exploite la liste des échanges à faire avec une liste de tâches à réaliser cycliquement, connue à l’avance et paramétrée au départ par l’administrateur .
Précisément, l’arbitre de bus émet régulièrement suivant un ordre des trames porteuses de nomenclatures (=un identifiant). Pour chaque nomenclature émise, il existe une seule station producteur et des stations consommateurs . Ce paramètrage des producteurs et consommateurs se fait sur chaque station pour chaque nomenclature émise et afin de réaliser les échanges voulus . Le TGV GEC-Alsthom utilise un réseau FIP de 1 Mbit/s pour commander des vérins et incliner le train dans les virages pour compenser la force centrifuge .

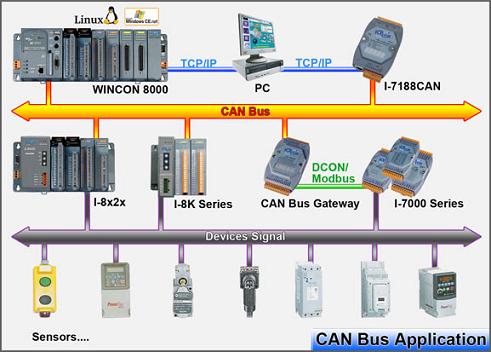
– Un autre réseau est le réseau CAN Controller Area Network . Il est utilisé dans le monde de l’automobile essentiellement (Mercedes classe S) mais aussi pour les ascenseurs (OTIS), les équipements de bateaux ou les équipements médicaux … CAN fournit un débit de 125kbit/s à 1Mbit/s avec de la paire torsadée ou de la fibre optique sur des longueurs de 40 m (pour du 1Mbit) à 1000 m (pour 50kbit/s) .
Le réseau CAN utilise une topologie en bus avec un bus multi-maître .L’accès au support utilise la méthode CSMA-CR Carrier Sense Method Acces With Collision Resolution . Lorsque le bus est libre, plusieurs nœuds demandent l’émission de leur trame . Lorsque cela crée un conflit de bus, ce conflit est résolu bit à bit sur le contenu binaire de l’identificateur des stations concernées en réalisant un ET logique entre les deux identificateurs pour déterminer la station qui continue . CAN s’administre à l’aide d’un logiciel .
– Le réseau Modbus est un ancien réseau qui est encore parfois utilisé dans l’industrie .
Il est utilisé pour relier des automates programmables, des terminaux intelligents d’ateliers et des calculateurs d’ateliers . Il peut être relié et est compatible avec le protocole JBus . Il utilise une topologie en bus sans aucun support imposé (paire torsadée, fibre optique, cable coaxial bande de base ou large bande) sur une longueur de 1200 m maximum avec un débit de 50 bit à 38400 bit/s pour 255 abonnés maximum . Il utilise une architecture avec un maître et des esclaves . Le maître peut parler à un esclave en particulier et attendre sa réponse (par exemple une sonde de température) ou encore parler à l’ensemble des esclaves sans attendre de réponse . Aucun esclave ne peut émettre sans y avoir été invité par le maître .

